

人形机器人专题报告:空心杯电机&滚柱丝杠
 【资料图】
【资料图】
人形机器人关键环节拆解
关键环节:线性执行器+灵巧手
灵巧手
相较具有20+个自由度的人手,特斯拉人形机器人灵巧手基于应用场景,保留11个自由度,在简化工序、优化成本的同时达到较佳的性能:
单手6个执行器,可使用工具,实现小物件的准确抓取,举起20磅的重量。
线性执行器
参考人体膝关节结构,通过四个连杆+四个枢纽进行机械模拟,即可实现较好的动能转换;
特斯拉optimus通过手臂、腿上的线性执行器,对图示关节进行操控,模拟人类四肢运动。
上一篇:关于加强“自媒体”管理的通知
下一篇:最后一页
- 人形机器人专题报告:空心杯电机&滚柱丝杠
- 热评两岸|大陆为什么对台湾地区启动贸易壁垒调查?
- 关于加强“自媒体”管理的通知
- 新华时评丨持续推进高校毕业生更加充分更高质量就业
- 2022年我国医保改革继续深化 群众待遇巩固完善
- 各地采取务实举措助力高校毕业生就业
- 上半年汽车工业多项经济指标创新高
- 白癜风患者怎样挑选水果食用?
- 【津巴观察】津巴布韦选举前夕:反对派指责执政党针对性行动,暴力事件愈演愈烈
- 今日上市:国科恒泰、赛维时代、昊帆生物、誉辰智能、天力复合
- 温氏股份:融资净买入15.73万元,融资余额7.07亿元(07-11)
- 最新放假通知?杭州因亚运会9月10日到25日放假?
- 高温来袭,教你巧防中暑
- 新时代美德山东丨齐河:美德信用+积分管理,让德者有“得”
- 二三四五07月11日被深股通减持76.49万股
- 7.11汉服上新合集 棉麻观感+复古老袍子爱了
- 未来五年将投放五款新车 东风本田电动化转型全面提速
- 海尔三门冰箱仅售5折
- 荣耀X40GT,推荐给购机预算1379元的消费者
- 凯迪股份聘任孙煜为财务总监
- 如果朱棣再多活一年那么他会效仿朱元璋将皇位传给孙子吗?
- 海棠推文丨清冷美人想by名吾识(abo)免费阅读
- 优化生育(三孩)板块7月11日涨0.41%,华特达因领涨,主力资金净流出3.42亿元
- 新手提新车注意些什么(新手买新车提车的注意事项是什么)
- 网上卖童装货源号的可靠吗?(童装货源吧怎样发帖)

7000mAh大电池!台电推出M40 Plus平板电脑 运行Android 12系统
2022-11-15 快科技
扶持毕业生自主创业 高校探索就业新路径
2022-05-25 人民网 原创稿
农业农村部:全国春播粮食进度超九成 旱地作物播种进入扫尾阶段
2022-05-25 人民网 原创稿
我国数字适老化产品尚未完全覆盖老年人常用的所有应用
2022-05-25 人民网 原创稿
百日千万招聘行动推出智能制造等7场招聘 提供65.3万个岗位
2022-05-25 人民网-社会频道 原创稿
中办国办印发《乡村建设行动实施方案》 提出12项重点任务
2022-05-25 人民网 原创稿
国家发改委:正牵头制定数据要素基础制度文件
2022-05-25 人民网
与时代同行 为人民放歌
2022-05-25 人民网 原创稿
工信部:将与金砖国家加强产业链供应链合作
2022-05-25 人民网 原创稿
2022年阿里巴巴全球数学竞赛预赛答案公布
2022-05-25 China Daily
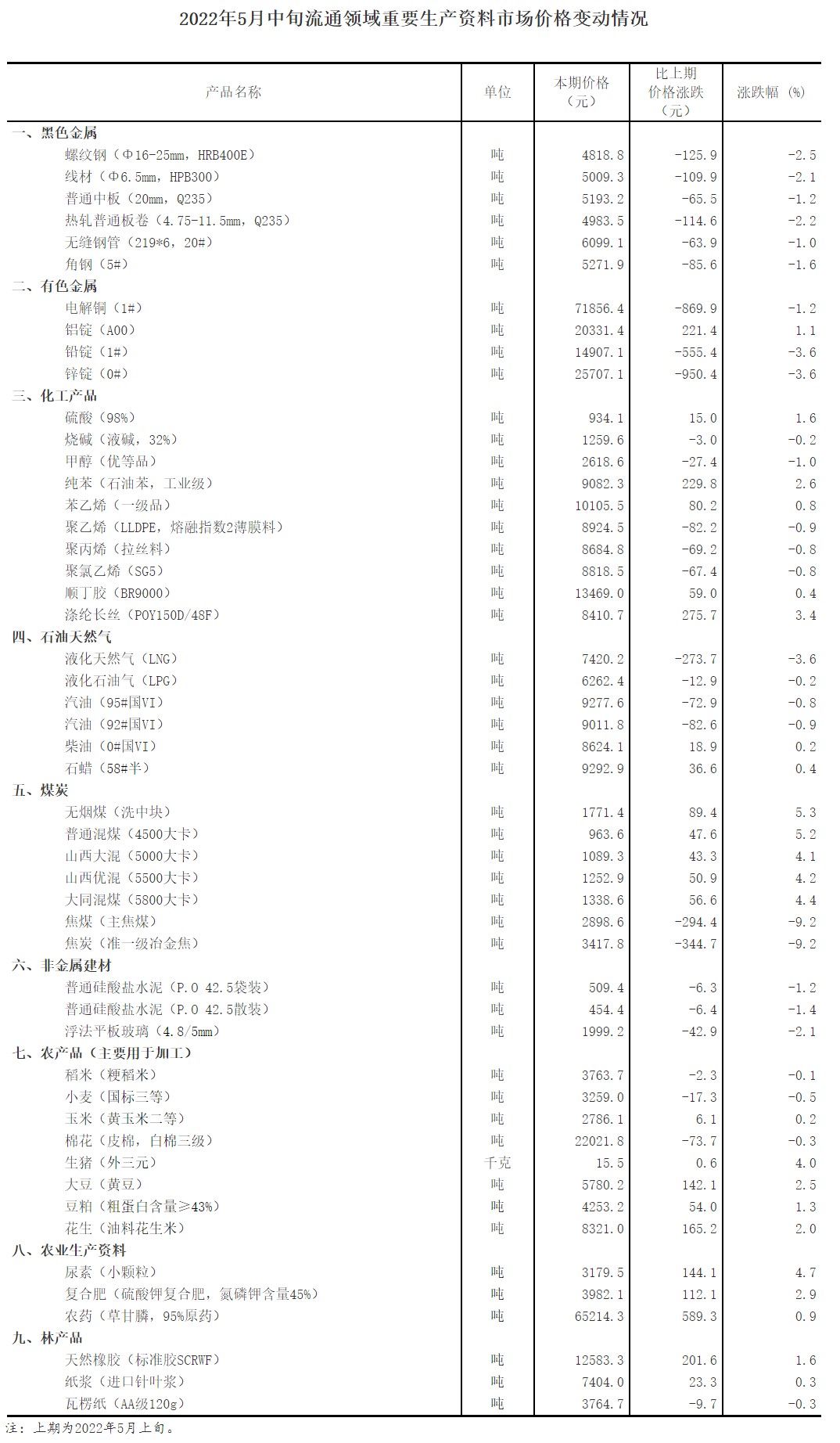
国家统计局:5月中旬重要生产资料市场价格23种上涨27种下降
2022-05-25 人民网 原创稿
李克强主持召开国务院常务会议
2022-05-25 人民日报
“天外来客”讲述太阳系“童年”故事
2022-05-25 科技日报
“东数西算”,寻找算力的西部支点
2022-05-25 科技日报
猫咪或能记住自己朋友名字
2022-05-25 科技日报
欲后来居上?韩企布局全球电动汽车市场
2022-05-25 科技日报
Copyright@ 2015-2022 地带网版权所有 关于我们 备案号:豫ICP备2021032478号-18 联系邮箱:89 71 80 9@qq.com